×
复制成功
微信号:13061644116
添加微信好友,了解更多产品详情。

| 货号 | 操作 | 名称 | 描述 |
|---|
| 图片 | 名称 | 货号货期 | 描述 | 价格 |
|---|
LDRVMLN是一款用于蝶形半导体激光二极管的电流驱动与温度控制模块。其主要功能包括:控制激光器内部温度、产生恒流信号驱动激光器,并可将外部输入电压信号转换为电流驱动。模块具有三种Max. 电流驱动范围,适用于不同功率大小的激光器(通过电路板跳线进行选择)。
内置基准源具有极低的噪声水平,并可以达到16位控制精度。电流和温度参数都可储存在模块上,经由一个简单的外部触发信号就可以该参数运行激光。使得该模块构成一个即插即用的、超高稳定性的激光光源。
特性 | Min. | Max. | 单位 | 注释 |
电源电压 | 4.8 | 6.1 | VDC | 直流 建议采用稳压电源 |
功率 | 10 | W | ||
Max. 驱动电流 | 149/ 378/ 624 | mA | 跳线选择 | |
电流分辨率(LSB) | Max. 电流/65536 | mA | ||
电流线性度 | ±1 | LSB | ||
电流温漂 | ±25 | ppm/℃ | ||
电流噪声 | 200 | pA/Hz1/2 | 仅内置基准源 | |
激光驱动电压 | 3.4/2.8 | V | 5V电源 半幅度电流/满幅度电流 | |
4.3/3.7 | V | 6V电源 半幅度电流/满幅度电流 | ||
响应频率 | 0 | 25 | MHz | -3db |
温度控制范围 | -10 | 50 | oC | |
温度分辨率 | 0.001 | oC | ||
温度稳定性 | 0.002 | oC | 需要外壳散热 | |
TEC输出电流 | -1.5 | 1.5 | A | |
TEC输出电压 | -4.6 | +4.6 | V | |
模拟输入 | 0 | 2.5 | V |
尺寸

(单位:毫米mm)
安装
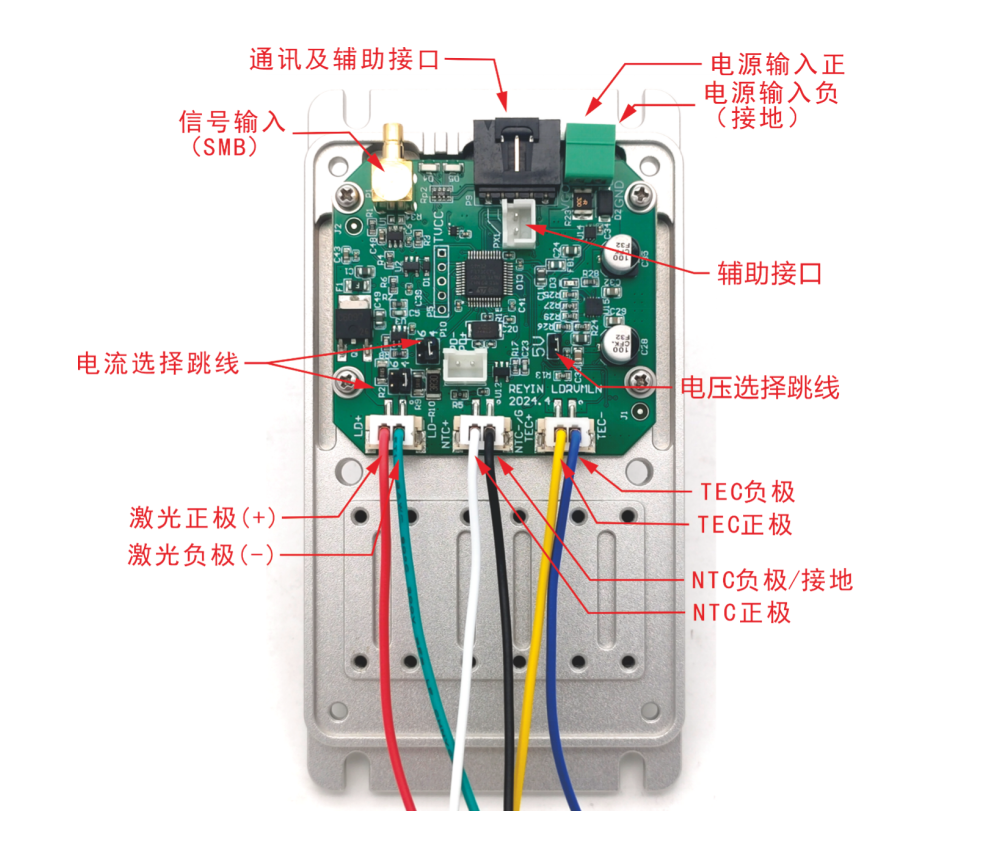
请务必先参照激光器手册,对应连接器的线序,以及电路板上的连线,确定激光器与当前线序兼容。在不正确的线序下通电可能导致激光器损坏!
模块的电源负极输入,底板及NTC负极均接地。且驱动输出的正极与负极均不接地。当要安装的激光器的有任一功能引脚接地(连接其外壳)时,需要te别注意。
当存在激光功能引脚接地情况(如激光正极接地)时,需要在激光器与底壳之间垫一块粘性导热硅胶,且不要用金属螺钉来固定激光,以使激光器外壳与底壳绝缘。如果不确定,请咨询销售方的工程师。不正确的接地将导致模块功能异常甚至烧毁激光器!
线路配置
在上电之前,模块需要调整电路参数以适应所安装的激光器。参数由电路板上跳线和拨码开关控制。务必在断电情况下操作!
请将LDRVMLN的Max. 驱动电流设置为等于或稍大于激光的Max. 允许电流。如果将驱动电流设置过大,将增加激光器烧毁的风险。设置由电路板上P3、P10跳线:


绿灯表示温度已稳定。用跳线帽短接RX和GND,使电流源开始工作,请在参数完全设置好后再使用本功能!
仪器后面板信号输入端INPUT用于接收外部输入,不开启内部偏置信号时,等效电路如下图所示:

激光器的驱动电流为:
ILaser = (V1/1.25V) x Imax
Imax=149mA , 378mA etc
当开启内部信号时,等效电路如下:

若仅使用内部信号,应断开INPUT接口上的一切连接。如果要同时使用内部和外部信号,请按照上述的等效电路来自行计算最终效果。
装回仪器盖板,将控制器连接电源,并用USB线连接电脑。WIN7及以上系统会提示自动联网安装USB驱动。当使用其他系统或无法联网时
请在http://www.ftdichip.com/Drivers/VCP.htm 下载对应驱动。驱动安装好后会在“设备管理器”出现虚拟串行设备。
打开电脑端专用软件,如下图所示:

电脑为主控端(上位机),发送字符串命令。以“:”冒号作为起始符开始一行命令,以回车(\r\n)结束一行,下位机执行后返回信息。以下所有功能均可通过配套软件访问,
建议以配套LDPD软件完成设置并得到正确波形后,点save保存参数至下位机,再转由其他客户端来进行控制。
运行模式如下:
1 | 运行模式 |
>>>>>> 发送auto on开始,返回(1)Auto run started.[[OK]]\r\n >>>>>> 发送auto off停止, 返回(0)Auto run stopped.[[OK]]\r\n
|
参数设置
发送 | 功能及返回值 |
about | 返回下位机当前的参数: >> 优秀行 (%f) TEC.\r\n >> (浮点数,与下发的参数一致) >> 第二行 (%d,%d,%d) PGA,freq,amp.\r\n >> (对LDRV模块,以上为无意义参数) >> 第三行(%d,%d,%d) bias.\r\n >> (数值与下发命令bias a,b,c一致) >> 第四行 (%d,%d) dm,phase.\r\n >> (LDRV上为无意义参数) |
version | 回复: RYMLASER<本机型号><版本号> |
temp | 返回当前环境温度值,激光器温度,返读电流值 |
tec x | x为摄氏温度,设置激光器的目标温度,可为小数, |
tecp kP kI kD | 设定温度控制系统的PID参数,用以保证温度控制系统的稳定,用户可以调整参数以实现快速或慢速响应 限制专业用户使用!不良的PID参数会导致温度震荡,甚至损坏激光器 系统出厂值: kP =1500; kI=4000; kD=10 |
tecfast | TEC常规模式,使用已存储的PID参数 |
tecslow | TEC慢速模式,使kP/2, kI/8,将降低温度系统的时间常数 |
bias a b c | a:电流设定(0~65535) b:限流设定(0~65535) c:无意义参数,设置为1以上数值 a和b数值通过下述公式计算 a = (Iset/Imax)*65536 Iset为要设定的电流,Imax为仪器Max. 电流(根据本机型号,在Instruments.ini中查看) |
save | 保存当前的所有参数,下次开机会自动调用。 |